|
|
|
|
|
|
|
| Vous êtes ici : Home > Robots > Type 1 | |||||
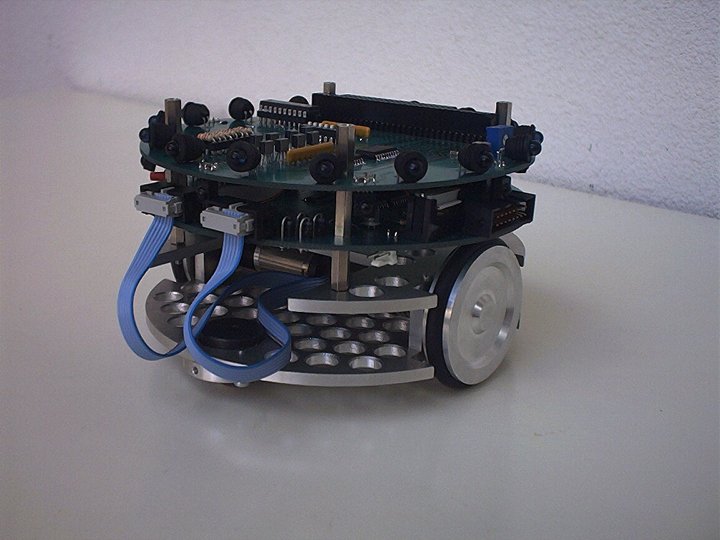
TYPE 1
|
||||||||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
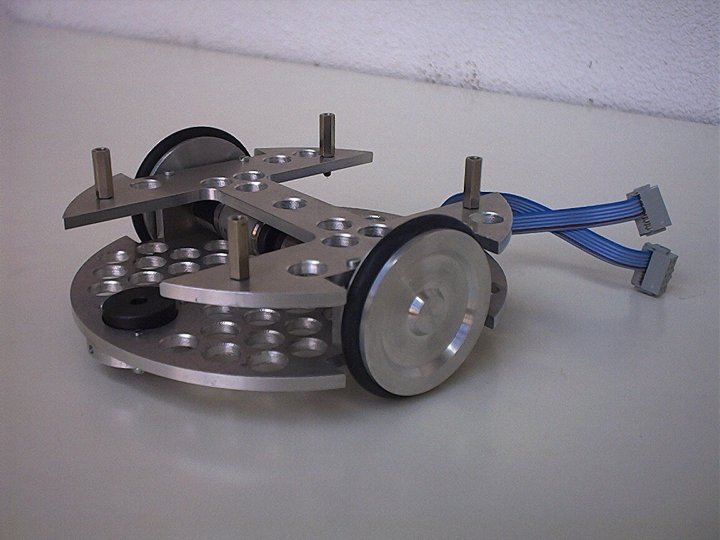
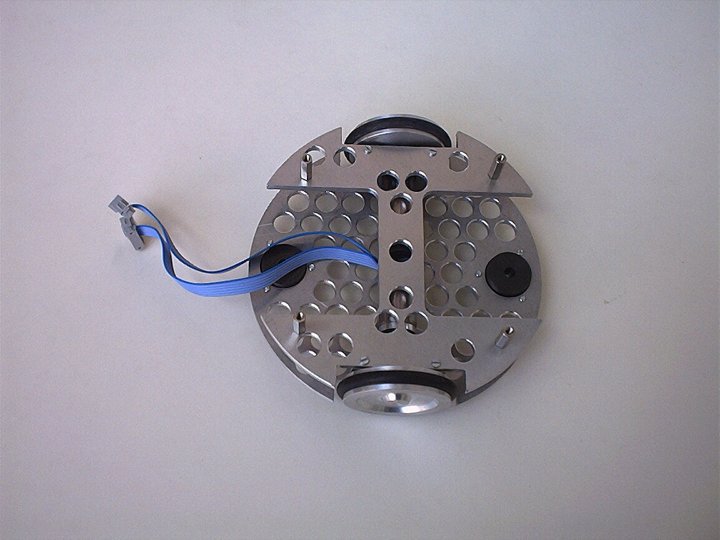
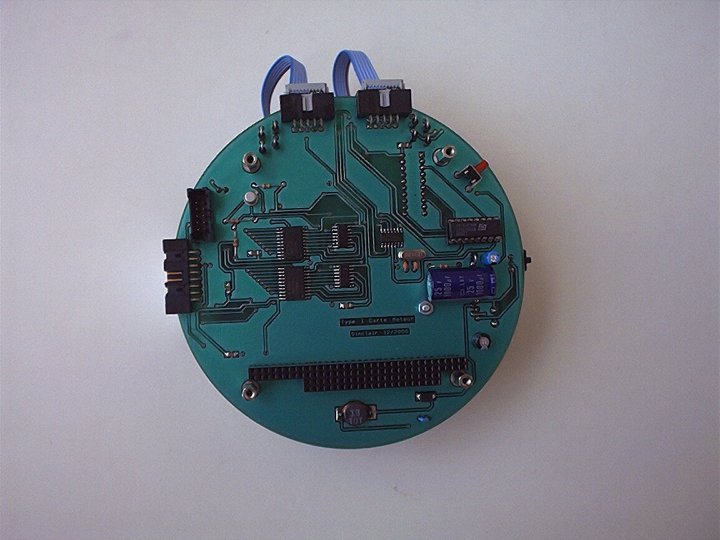
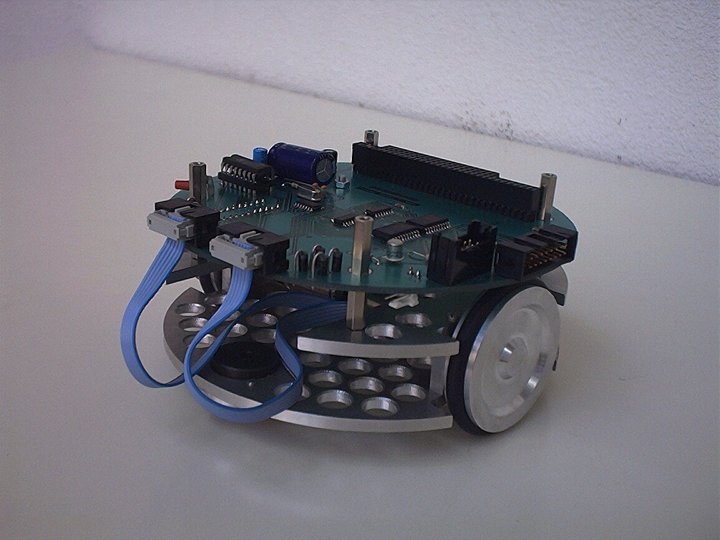
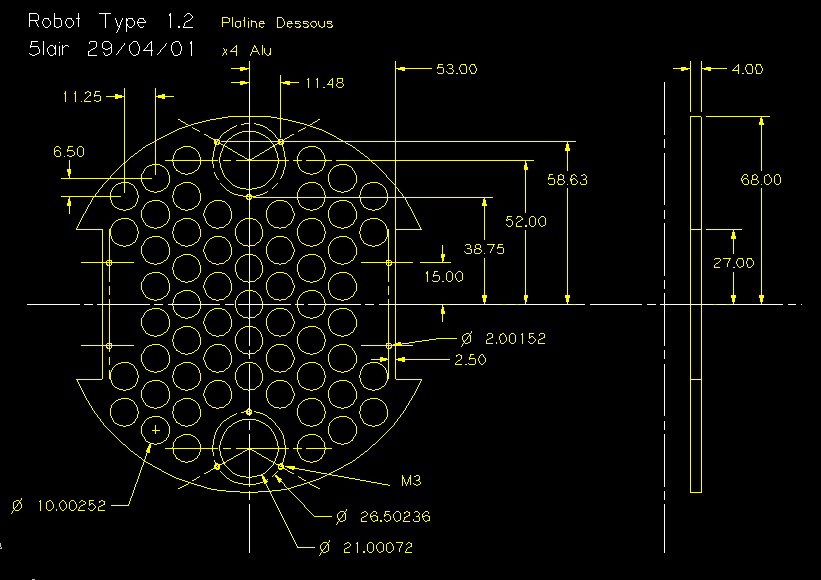
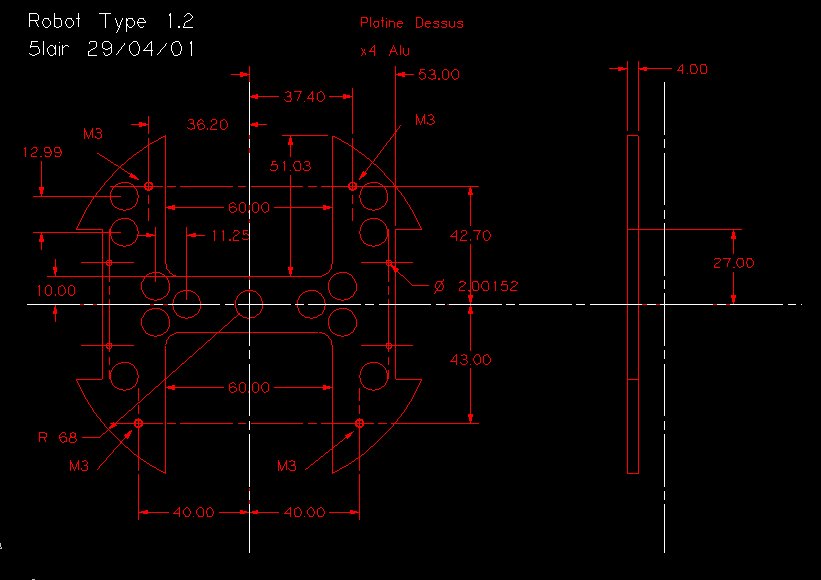
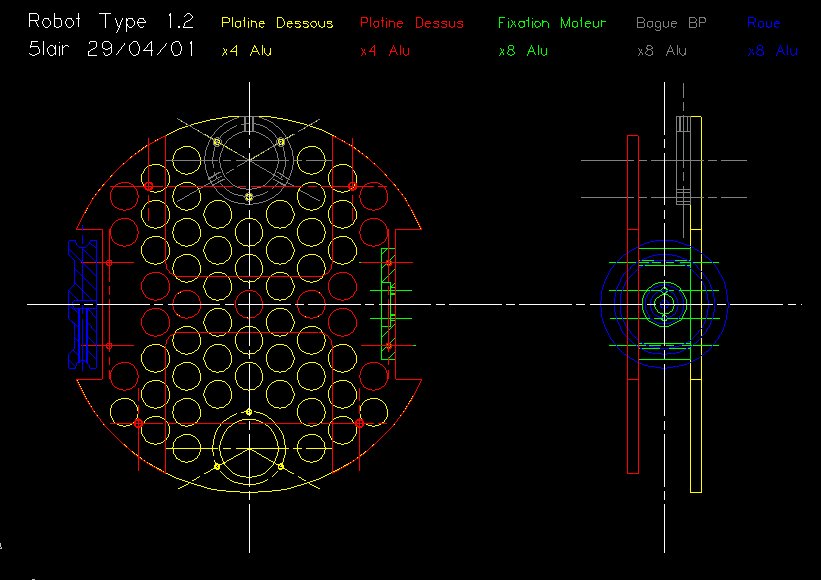
Voici les plans des deux cartes. Les deux images de gauche correspondent a la carte moteur et les deux images de droite à la carte infra-rouge. Pour gérer la puissance sur les moteurs, nous avons utilisé un 89C2051 d'ATMEL, qui nous produit les signaux PWM. Schéma MOTEURS. Pour récupérer l'information des codeurs, une bascule nous donne le sens et un compteur permet de stocker les informations entre deux lectures. Schéma CODEURS. Le robot est controllé par un PC, il faut donc interfacer le bus ISA pour pouvoir piloter les cartes. C'est le rôle du schéma BUS ISA. Il faut également utiliser une alimentation à découpage, c'est le schéma ALIM. Nous utilisons des capteurs infra-rouges pour la détection d'obstacles et les communications, mais nous ne sommes pas propriétaire de ce schéma, et nous n'avons pas été autorisé à le publier. |
||||||||||||||||||||||
|
||||||||||||||||||||||
| Pour toutes questions envoyer moi un mail: Sinclair | ||||||||||||||||||||||
![]()