|
|
|
|
|
|
|
| Vous êtes ici : Home > Fiches Techniques > Le pont en H | |||||
|
|
|
|
|
|
|
| Vous êtes ici : Home > Fiches Techniques > Le pont en H | |||||
LE PONT EN H
|
Lorsqu'on veux commander un moteur ( à courant continu ou pas à pas ) on est souvent obligé d'inverser la polarité. De plus il est généralement préférable de pouvoir faire varier la vitesse du moteur. La solution à ces deux problèmes s'appelle le pont en H. |
|||||||||||||||||||||
|
oPrincipe
: inversion de polarité
|
|||||||||||||||||||||
|
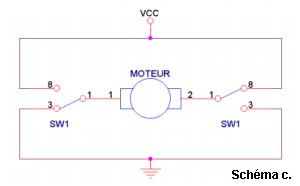
La première idée qui vient à l'esprit lorsqu'on veut inverser les polarités d'un moteur est le schéma suivant :
En regardant les schémas, on devine le sens de rotation du moteur : sur le schéma a. le moteur est à l'arrêt (on devrait même dire qu'il est freiné : en effet court-circuiter les deux pôles d'un moteur revient à le freiner). Sur le schéma b. il tourne dans le sens inverse du schéma c. et enfin sur le schéma d. il est freiné. Et bien voici la base du pont en H, toute l'idée réside dans ce schéma. Bien sûr, pour l'implémenter, il va nous falloir remplacer les interrupteurs par des transistors.
Le schéma ci-dessus représente le schéma idéal du pont en H. (N'essayez pas de le cabler, si les transistors ne sont pas polarisés ça ne marchera pas). Quand l'entrée In 1 (In 2) est active, le transistor Q1 (Q2) est passant et le transistor Q3 (Q4) est bloqué. Quand In 1 est actif, le pôle 1 du moteur est au potentiel Vcc, et lorsque In 1 est à l'état bas, le pôle 1 du moteur est à la masse.
Lorsque l'on arrête le moteur, et qu'il continu à tourner avec l'inertie, il se comporte comme une génératrice. Pour éviter d'avoir des courants dans les transistors on monte des diodes de roues libres. |
|||||||||||||||||||||
|
oPrincipe
: Variation de vitesse (PWM)
|
|||||||||||||||||||||
|
Quand on veux faire varier la vitesse d'un moteur, la première idée qui vient à l'esprit est de faire varier la tension au borne du moteur. Voici un exemple de courbe vitesse en fonction de la tension :
Vous constatez que pour des valeurs faibles de la tension, le moteur ne tourne pas. Lorsque la tension est trop basse, la force electromotrice ne peut pas vaincre les frottements et le rotor reste fixe. On ne peut donc pas faire tourner un moteur très lentement avec cette méthode. Pour corriger ce problème, on utilise des signaux PWM. Un signal PWM est un signal dont la période est fixe, mais le rapport cyclique varie. En d'autres termes, t1 et t2 varient tout en concervant t1+t2=T=constante.
Pourquoi alimenter un moteur avec ce type de signal permet de le faire tourner lentement ? Simplement parce que la tension appliquée au moteur pendant t1 est Vcc. Celle-ci est suffisante pour vaincre les frottements et faire tourner le moteur. Mais la tension moyenne appliquée au moteur est proportionnelle au rapport cyclique :
Vous voyez donc qu'avec cette méthode on peut faire tourner un moteur trés lentement. Il faudra tout de même faire attention au choix de T. Si on prend une fréquence de commande dans les fréquences audibles, on va entendre le PWM quand le moteur tournera. Selon la fréquence, le son pourra être désagréable. De manière générale, il vaut mieux prendre une fréquence supérieure à 20 kHz. |
|||||||||||||||||||||
|
oQuelques
liens
|
|||||||||||||||||||||
|
|||||||||||||||||||||
|
oContact
|
|||||||||||||||||||||
| Pour toutes questions envoyer moi un mail: Sinclair |
|
||||||||||||||||||||
|
|
|||||||||||||||||||||
![]()